Поделиться
Поделиться
Ученые виртуализировали подошвы роботов-футболистов
Российские инженеры разработали математическую модель, которая на языке формул описывает сцепление искусственной травы и подошвы робота-футболиста. Научная работа опубликована в журнале AIP Conference Proceedings. Об этом CNews сообщили представители МФТИ.
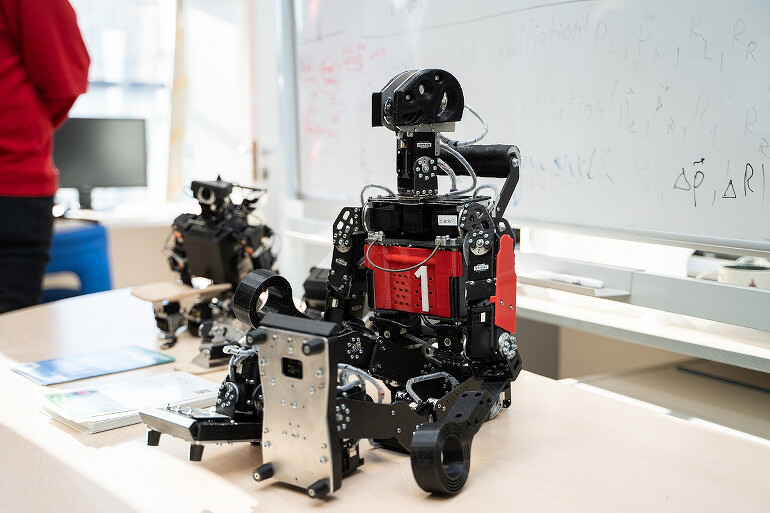
Машины, ставшие объектами исследования, — это человекоподобные роботы, имеющие голову, тело, по две ноги и руки и обладающие искусственным интеллектом. Они предназначены для участия в соревнованиях по робофутболу, которые проводятся в рамках Лиги гуманоидов под эгидой Humanoid League of RoboCup — структуры, объединяющей разработчиков, конструкторов и программистов со всего мира. Цель организации — создать человекоподобных роботов, которые смогут обыграть людей-чемпионов мира по обычному футболу.
«В рамках научной работы было предложено использовать модель трения на искусственной траве применительно к движениям робота-гуманоида. Сложность заключается в том, чтобы машины были устойчивы, но при этом совершали эффективные действия на поле. Поэтому подошва и шипы робота должны обеспечить сцепление с поверхностью, которая представляет собой хаотично «растущие» полиэтиленовые нити. При этом необходимо учитывать силы, которые взаимодействуют при контакте искусственной ноги с искусственной поверхностью. Такие, например, как трение, скольжение и упругость и другие. Предложенная модель позволяет учесть эти явления при моделировании», — сказал доцент кафедры теоретической механики и ведущий научный сотрудник лаборатории волновых процессов и систем управления МФТИ Сергей Семендяев. Он же является соорганизатором и соруководителем команды «Старкит» — ведущего коллектива в России по робофутболу.
Специалист пояснил, что задача устойчивости роботов-гуманоидов при ходьбе и выполнении тех или иных действий — одна из первоочередных в робототехнике. Для ее решения требуется привлечение знаний из разных сфер техники. Это механика, микроэлектроника, материаловедение, программирование, теория управления и многое другое.
Поэтому разработки, сделанные для антропоморфных машин-футболистов, будут также использованы в процессе конструирования и производства аналогичных устройств в других сферах. Например, при создании роботов-домашних помощников или роботов-космонавтов.
В целом решение задачи с устойчивостью искусственных человекоподобных механизмов можно разбить на несколько этапов. Это создание модели робота, создание модели окружающей среды, математическое моделирование, компьютерное моделирование, создание базовых шаблонов движений, создание алгоритмов управления, апробация в физическом симуляторе и апробация на реальном роботе.
Проведенное исследование, в котором с помощью математического аппарата были описаны стопы и шипы роботов в связке с поверхностью искусственного газона, в дальнейшем даст возможность внести коррективы в виртуальные модели. Они, в свою очередь, позволят оперативно проанализировать огромное количество режимов движений роботов, на изучение которых в экспериментальном порядке ушло бы значительное количество времени.
«Обычно в физических симуляторах поверхность, по которой учится ходить робот, представляет собой поверхность без проскальзывания. Здесь же мы, например, можем сформулировать задачу для физического симулятора с поверхностью с проскальзыванием, которое зависит от диаметра шипов. Можем уточнить модель трения, проведя дополнительные эксперименты, которые также можем учесть в моделировании», — уточнил Сергей Семендяев.
Как рассказал ученый, конструирование роботов-футболистов в настоящее время осуществляется в лаборатории волновых процессов и систем управления МФТИ. Принять участие в процессе можно, поступив в МФТИ на магистерскую программу обучения «Робототехника и искусственный интеллект» на кафедре интеллектуальных информационных систем и технологий Физтех-школы радиотехники и компьютерных технологий. Преподаватели программы — члены команды чемпионов мира по гуманоидному робофутболу «Старкит».
 Короткая ссылка
Короткая ссылка